
















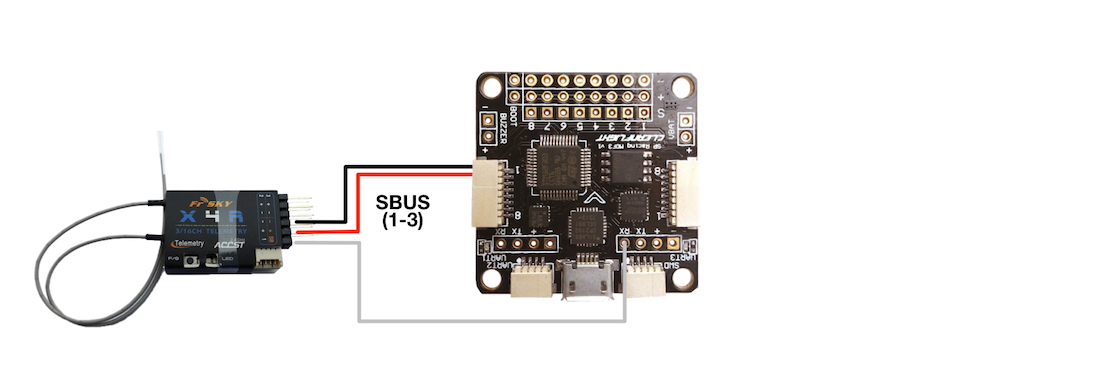
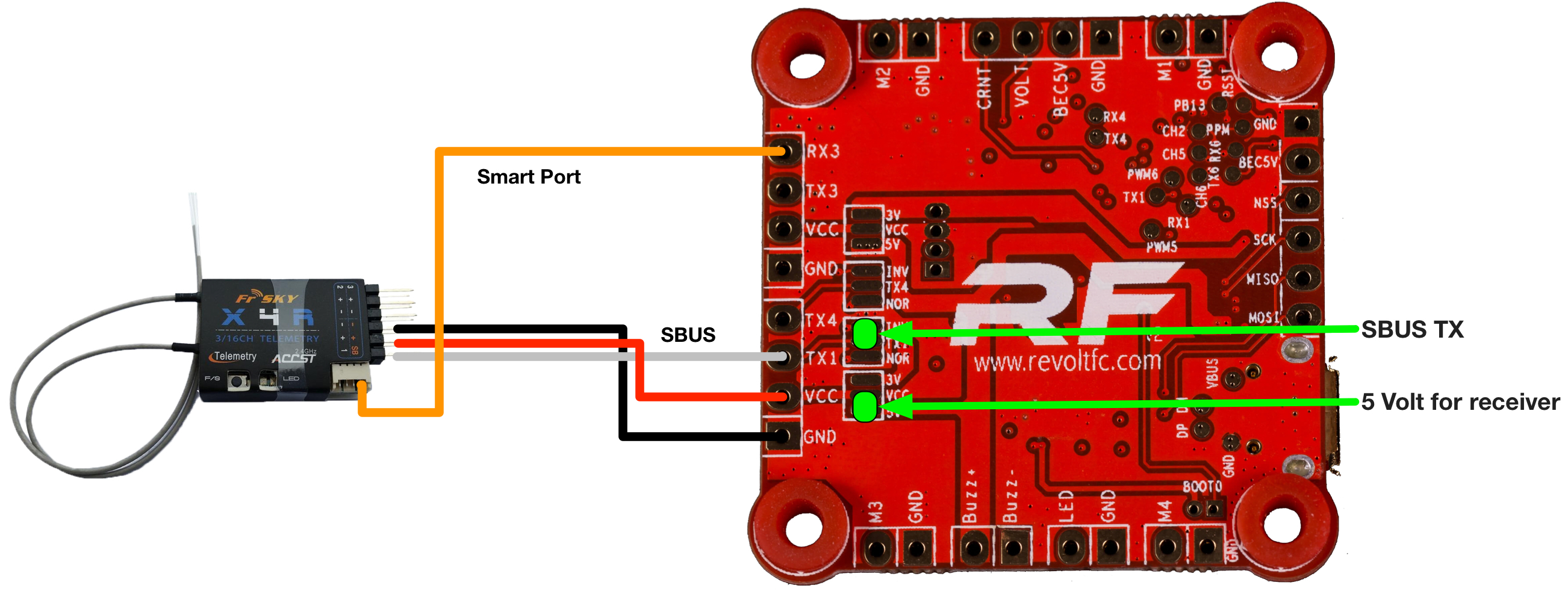
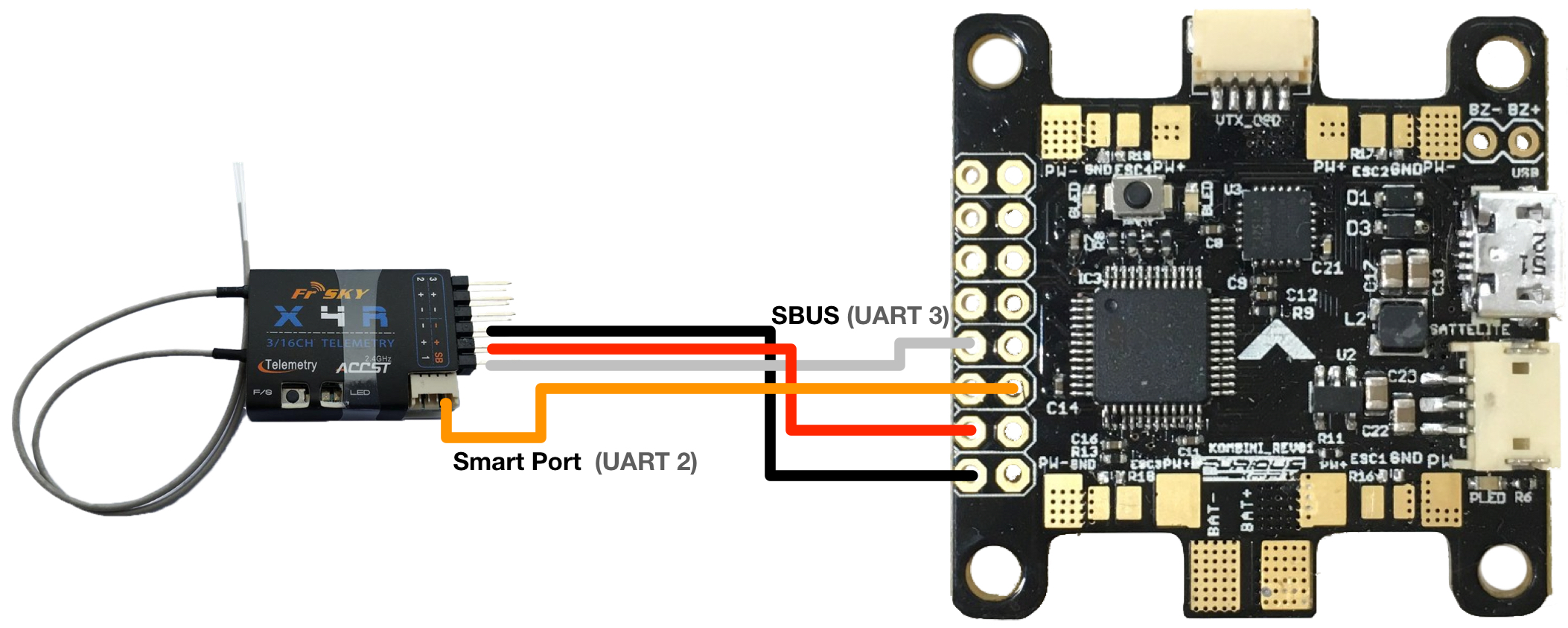
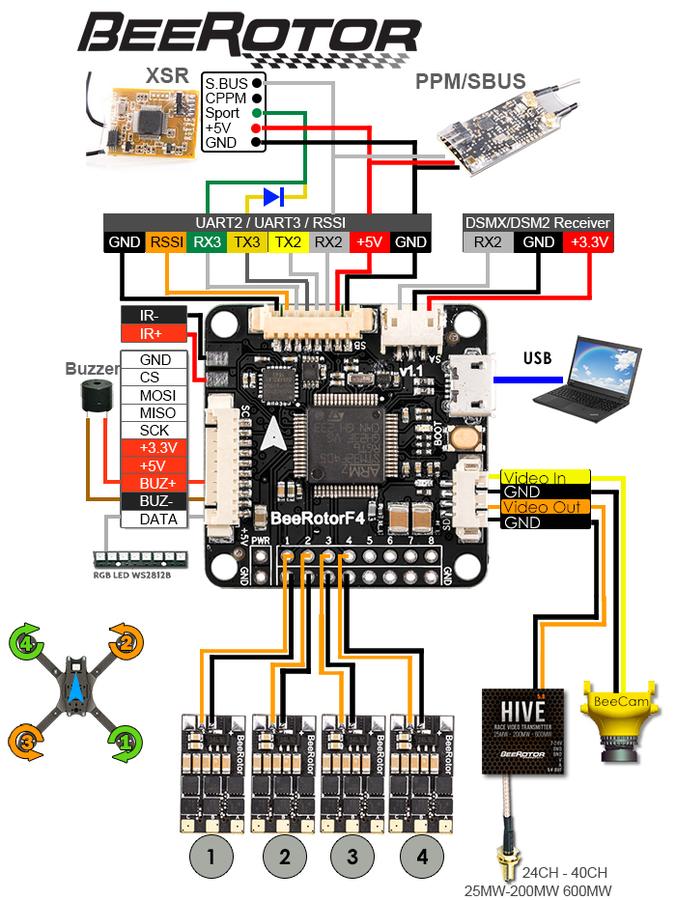
 How to connect SBUS - version A - (sometimes this does not work)
How to connect SBUS - version A - (sometimes this does not work)
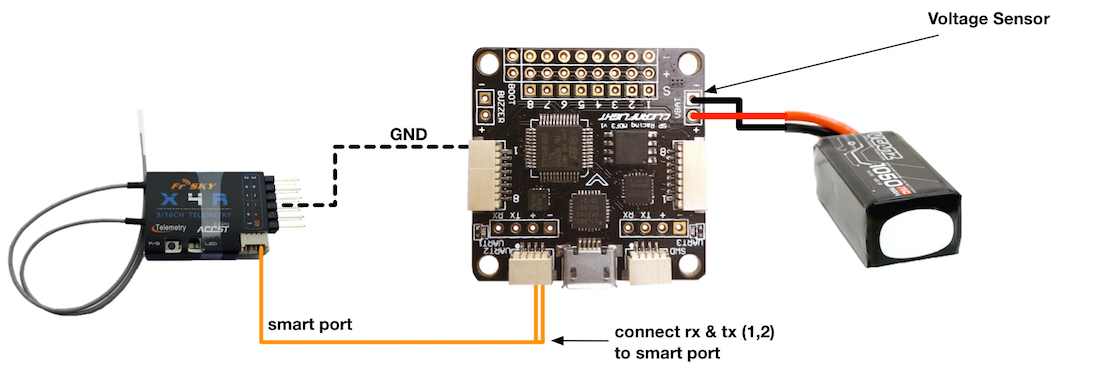
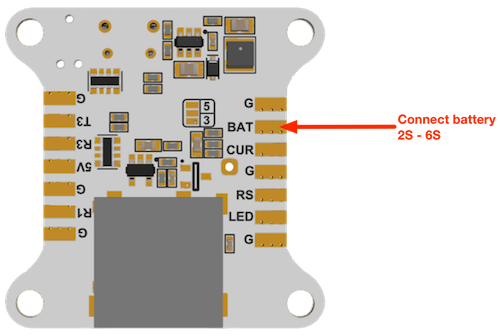
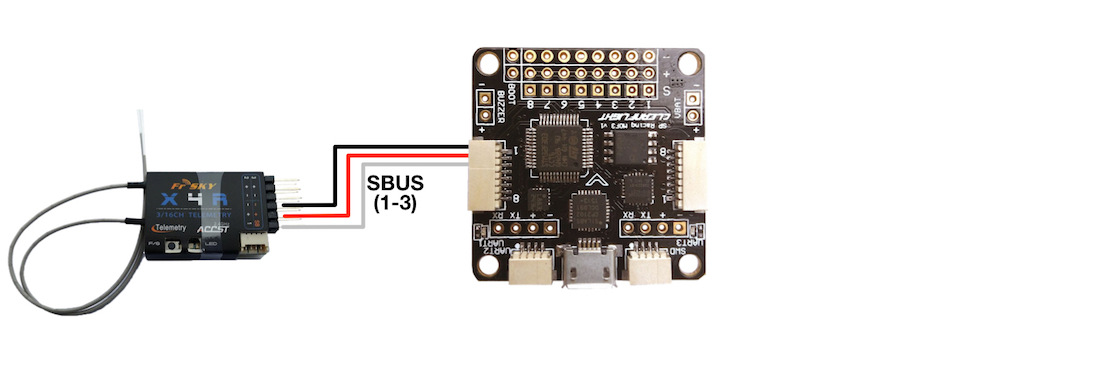 How to connect SBUS - version B - (solder it to the board)
How to connect SBUS - version B - (solder it to the board)

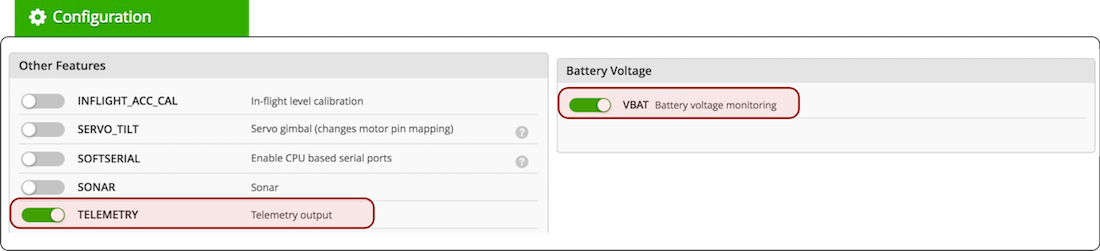


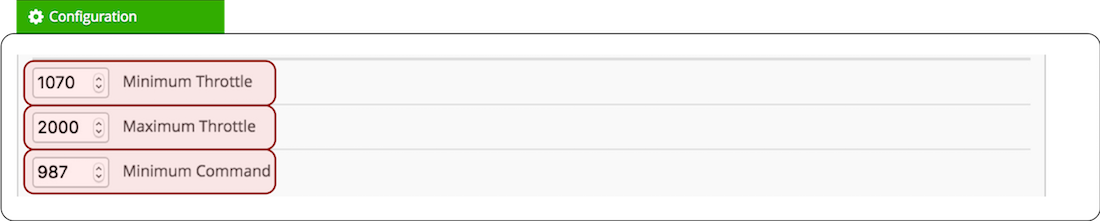
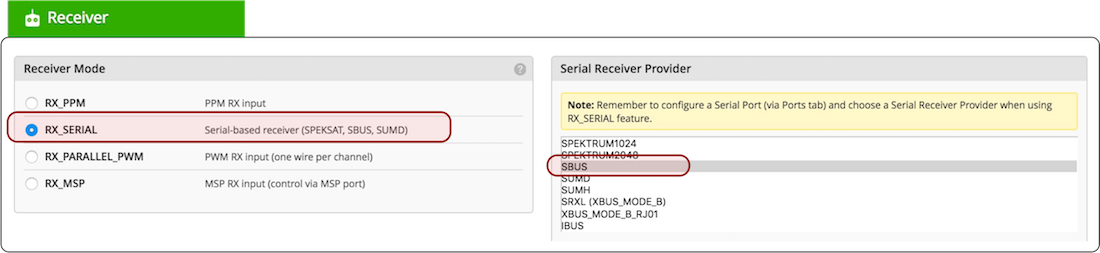
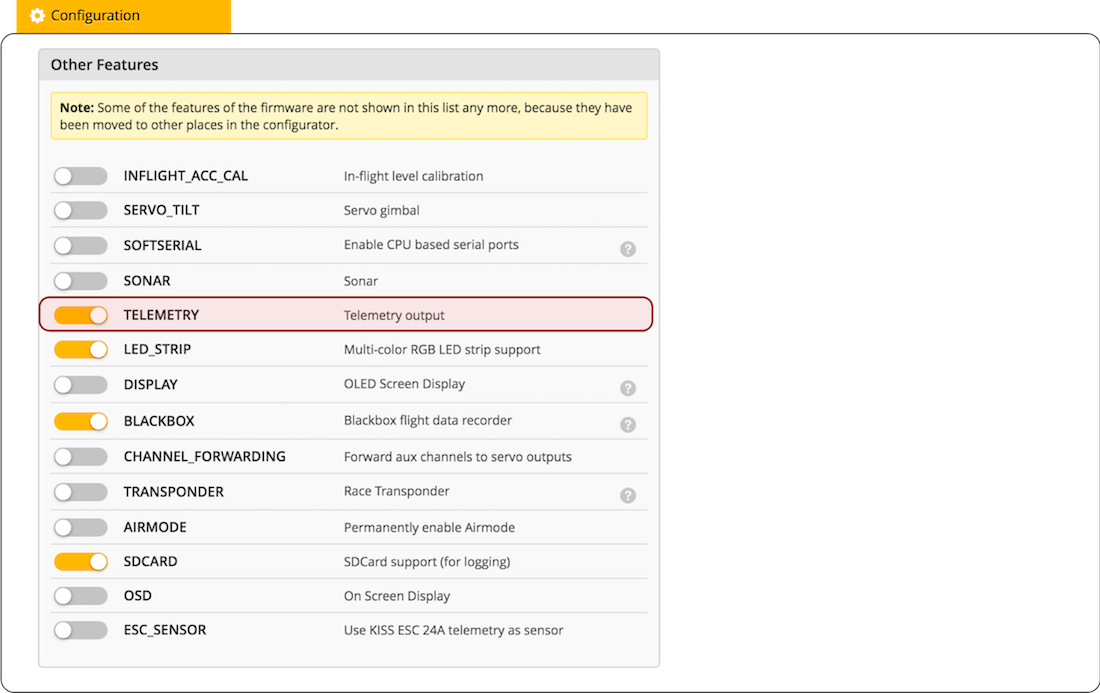
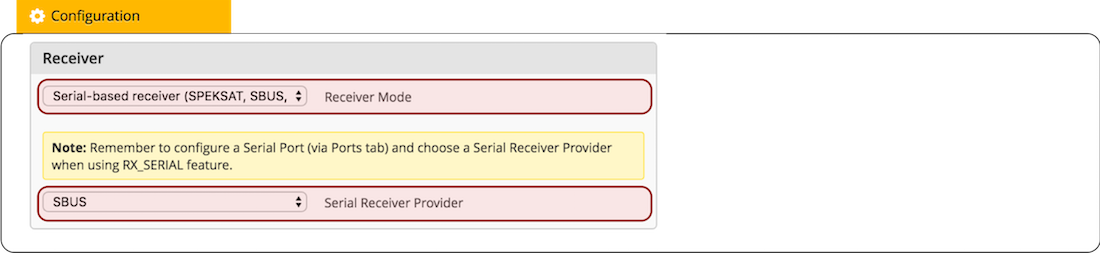
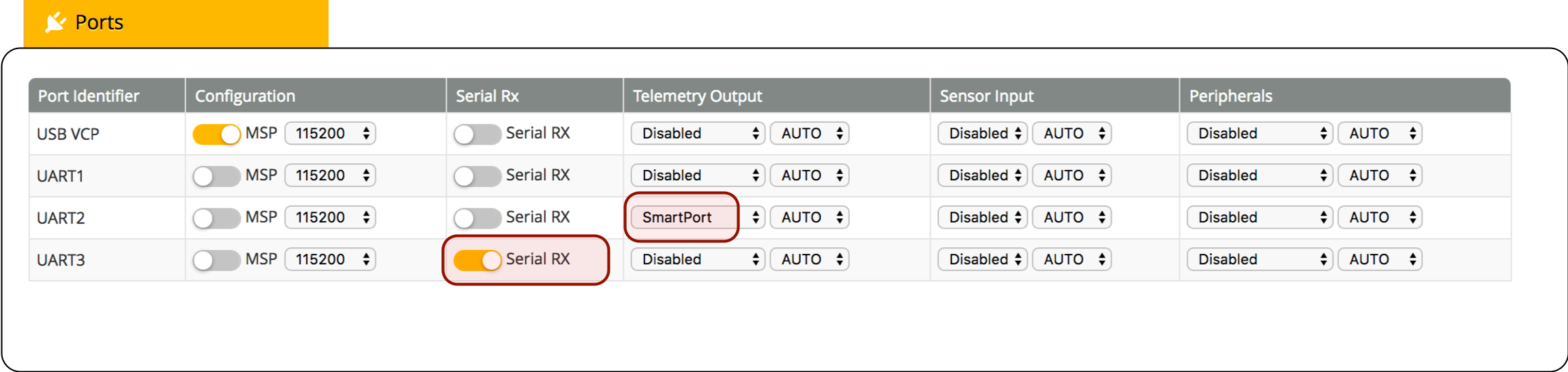
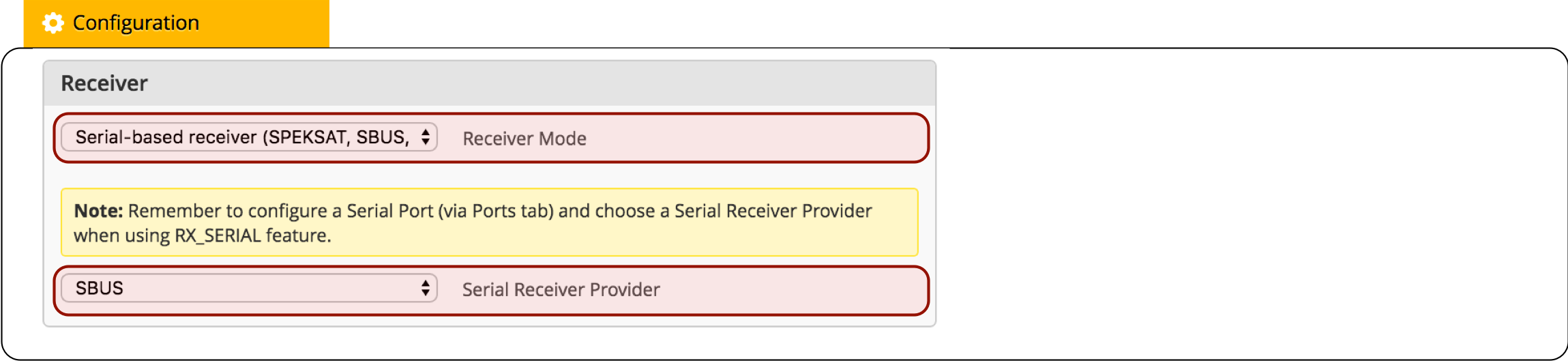
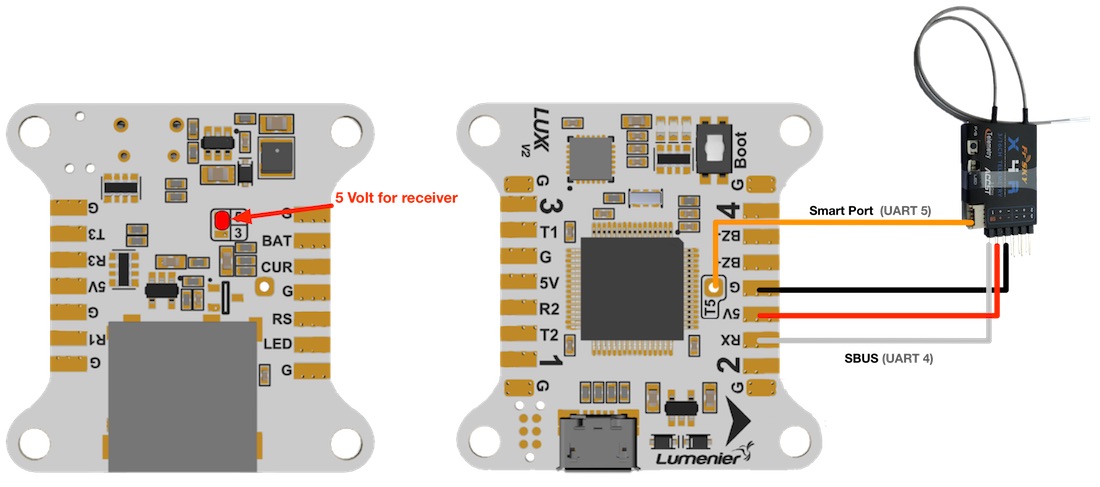 To use SBUS you need to turn on Serial RX on UART4 and set the receiver mode to RX_SERIAL. Set Smartport to UART5
To use SBUS you need to turn on Serial RX on UART4 and set the receiver mode to RX_SERIAL. Set Smartport to UART5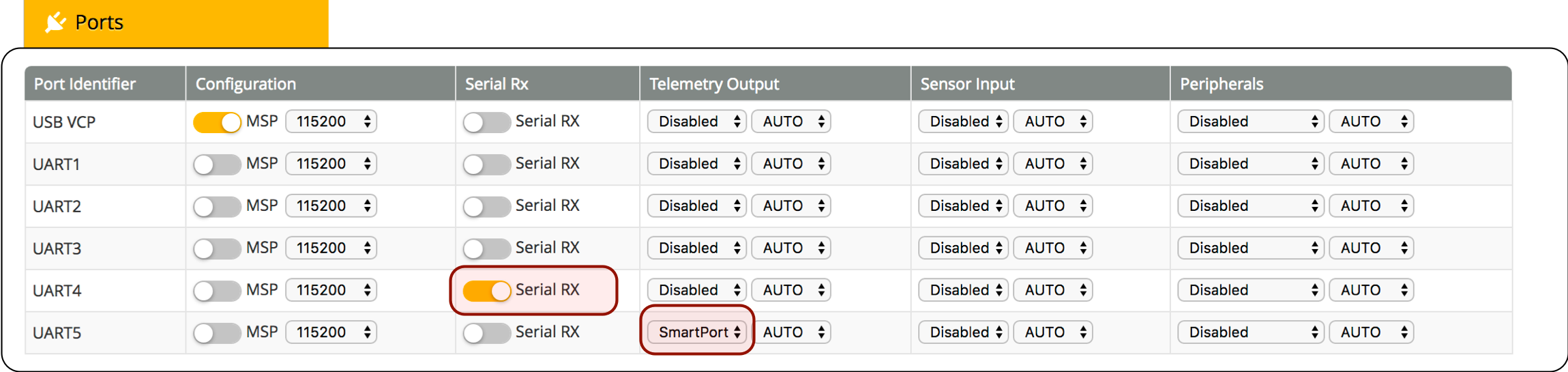
| Receivers |  |
 |
 |
 |
|---|---|---|---|---|
| Name | V8R4-II | D4R-II | X4R | XSR |
| Price | 15$ | 24$ | 25$ | 27$ |
| Output | CPPM | CPPM | SBUS | SBUS and CPPM |
| Max Channels | 8 (CPPM) | 8 (CPPM) | 16 (SBUS) | 16 (SBUS) |
| Manual | Manual | Manual | Manual | Manual |
| Bind Mode | D8 | D8 | D16 | D16 |
| Weight | 3.5g / 2.6g | 5.8g / 5g | 5.8g / 5g | 3.8g |
| Features | RSSI (PWM), Analog Telemetry | Smart Port, RSSI (PWM), Analog Telemetry | Smart Port |





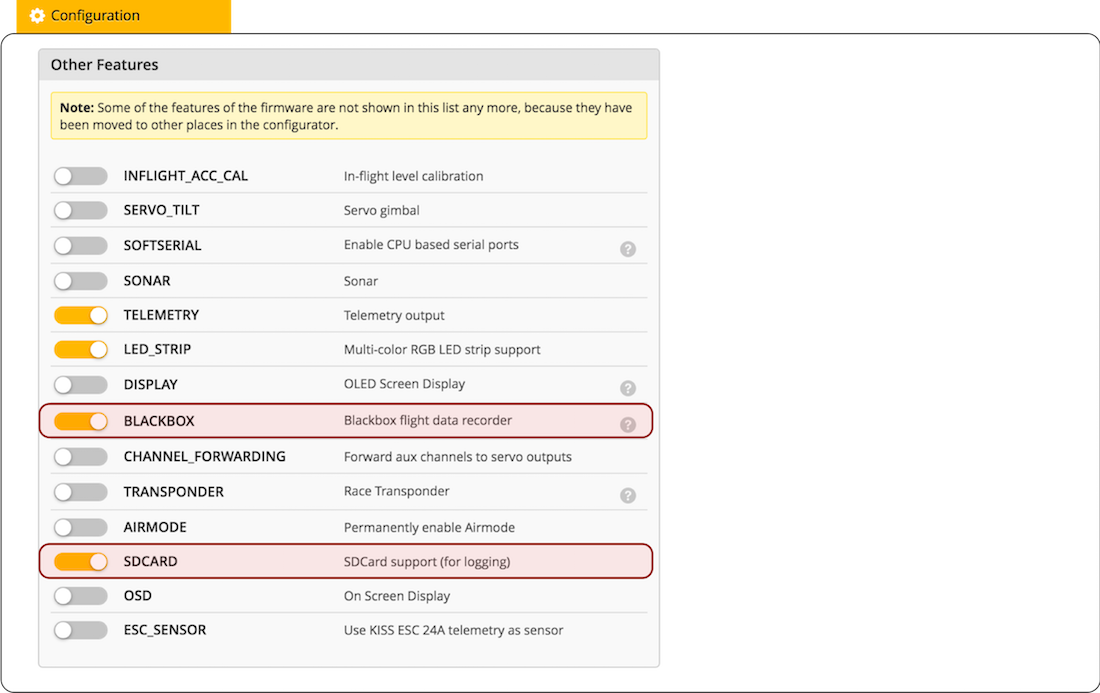
Using blackbox

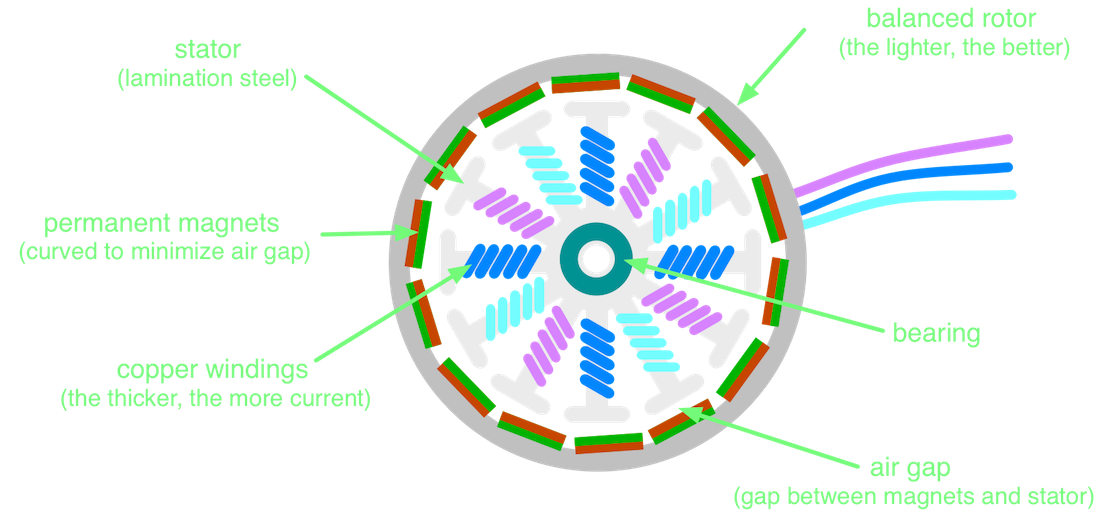
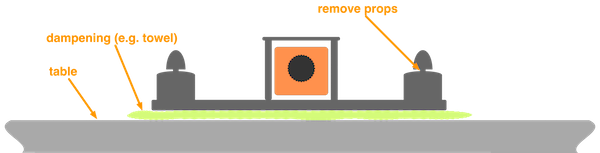 Motor vibrations increase during livetime
Motor vibrations increase during livetime
Using blackbox
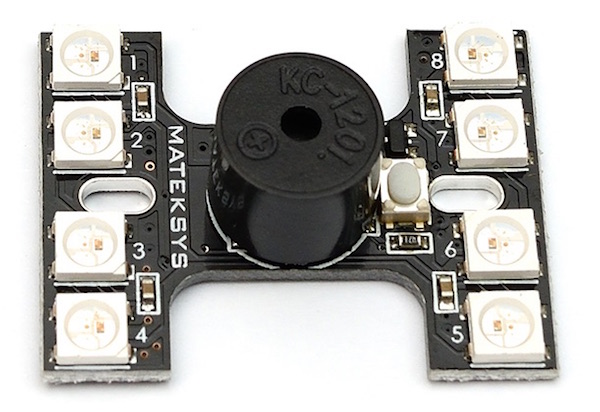
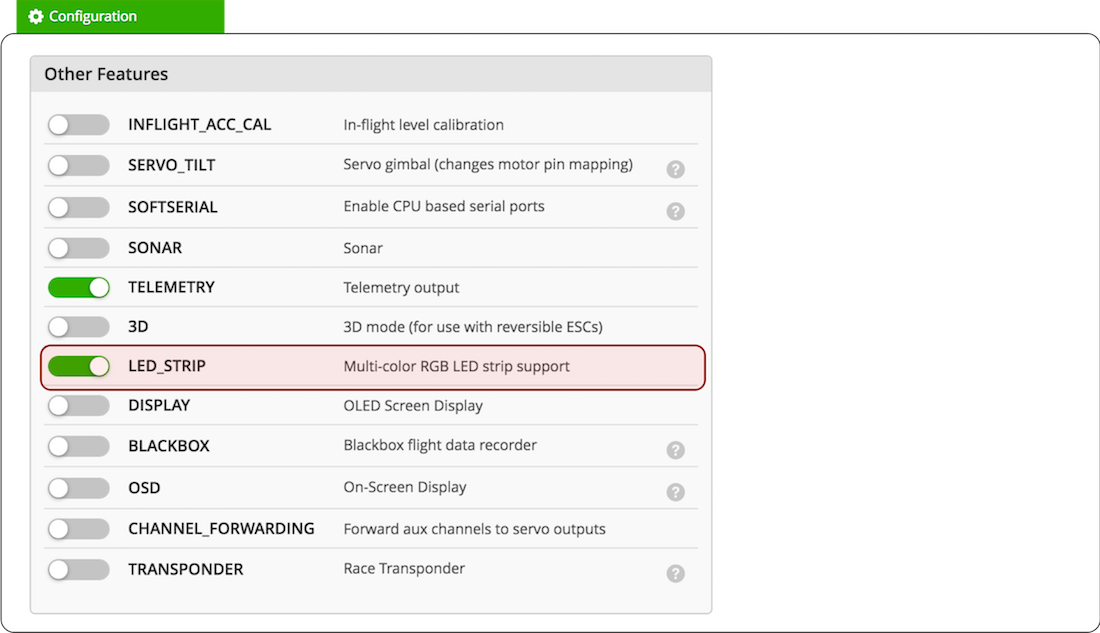
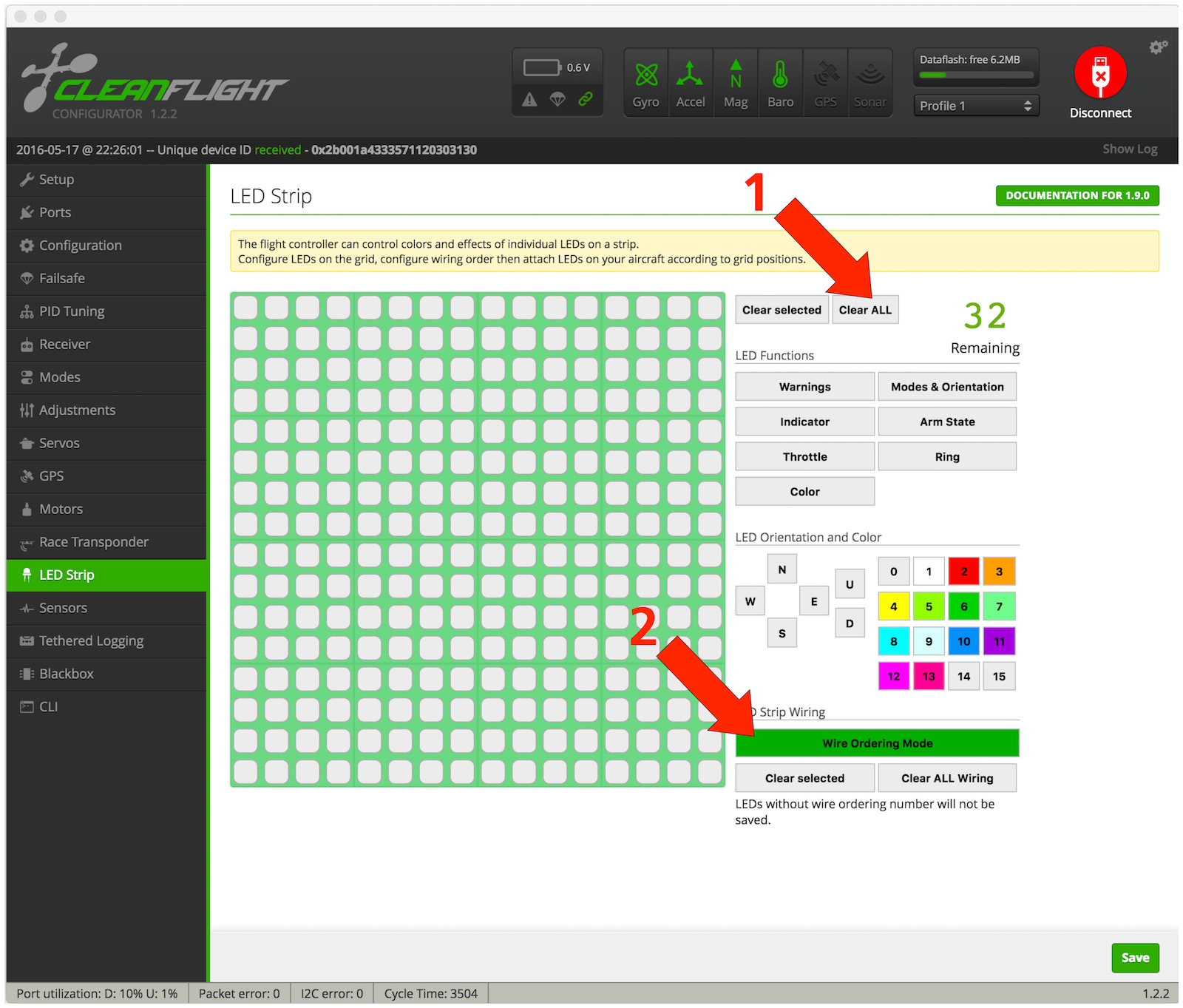
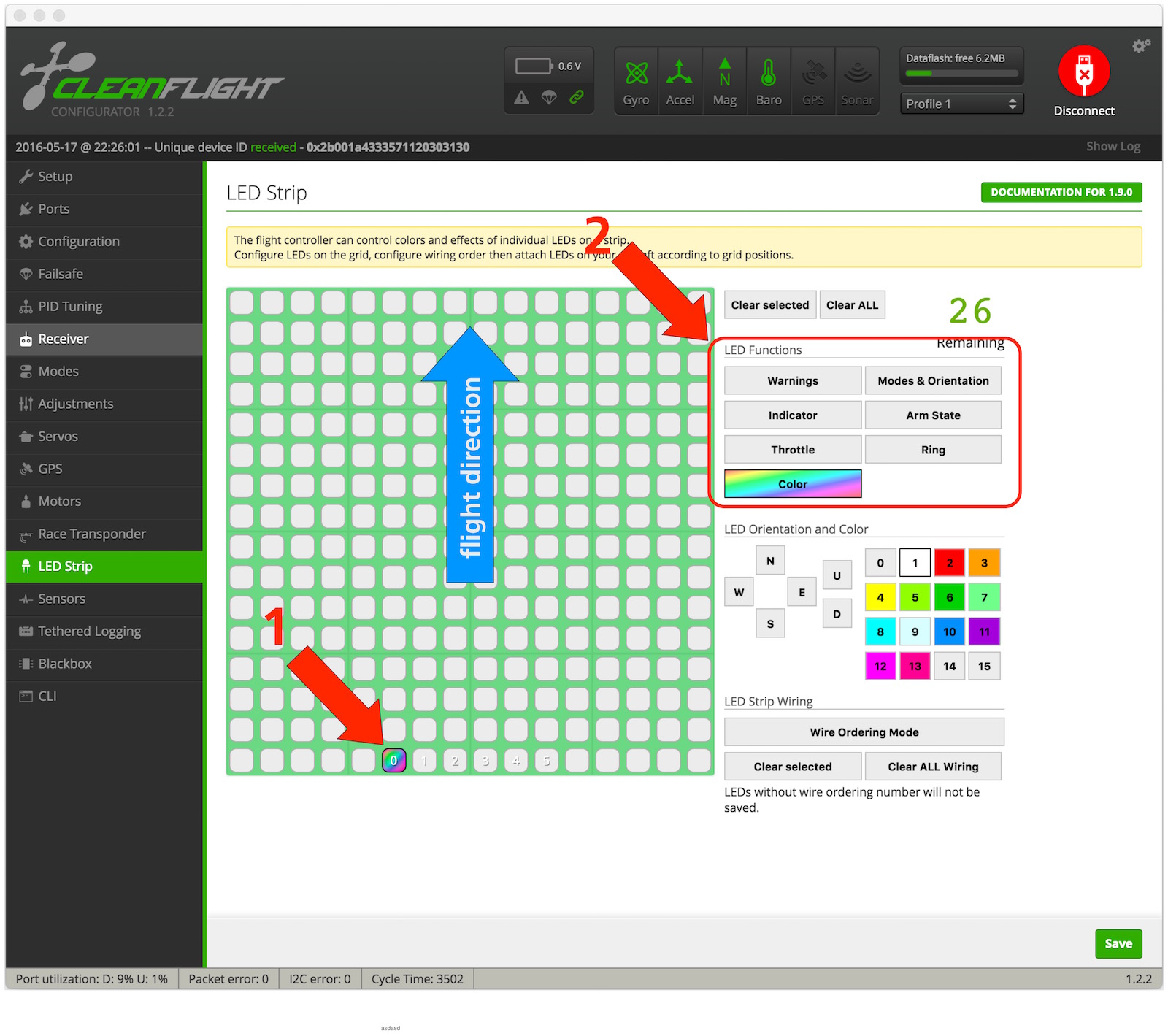
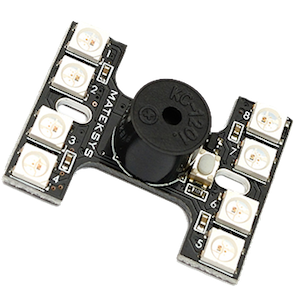
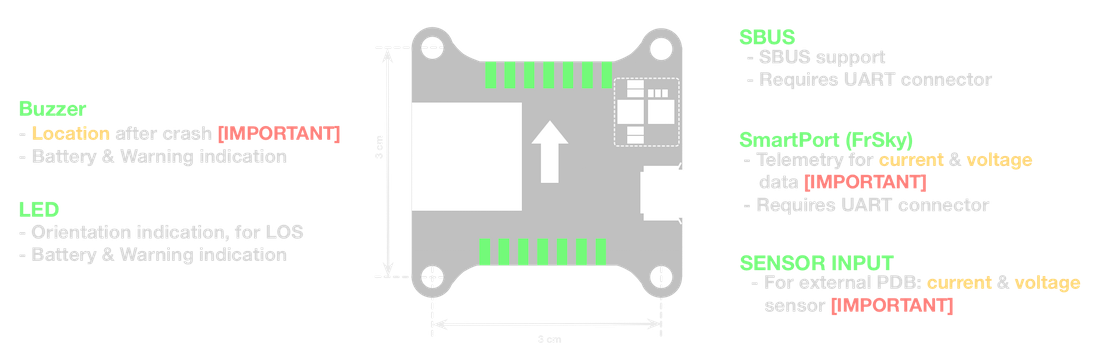
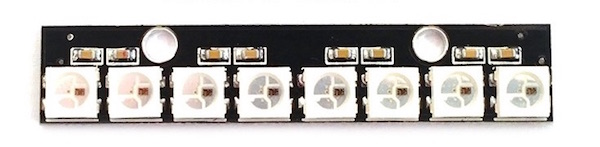
8 addressable LEDs, including a beeper to locate the racer after a crash. More info [PDF].
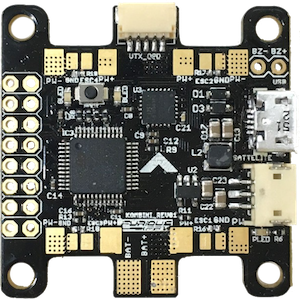
You need to set the device to FC mode without the DIN pad connected.
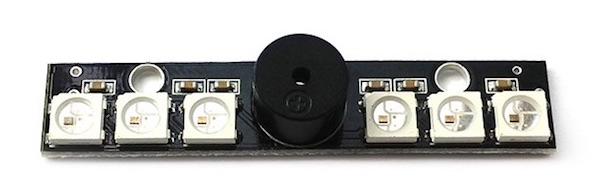
6 addressable LEDs, including a beeper to locate the racer after a crash. More info.
The beeper could be louder.
LED circle with static color. More info.
Nice for LOS flying. Keep in mind, that this requires longer screws for the motor.















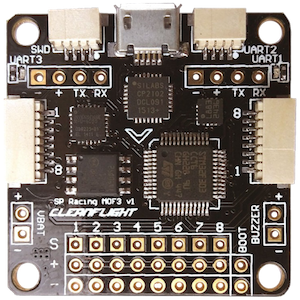














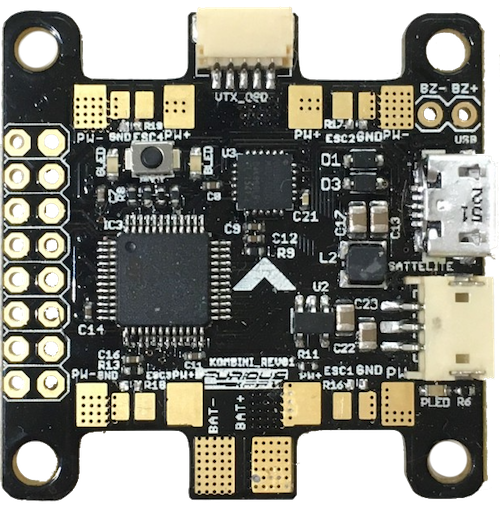
| Name | Seriously Pro Rac. F3 | Lumenier LUX V2 | Furious FPV KOMBINI | RaceFlight Revolt V2 F4 |
|---|---|---|---|---|
| Controller | |
|
|
 |
| SBUS | YES | YES | YES | YES |
| SmartPort | YES | YES | YES | YES |
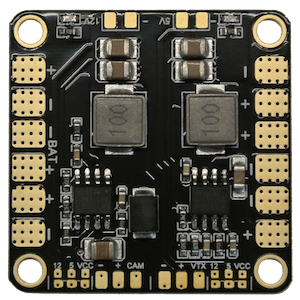
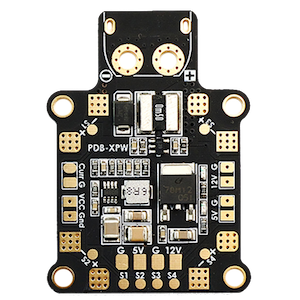
| PDB | NO | YES (5V 1A) |
YES (5V 2A, 12V 0.8A) |
NO |
| OSD | NO | NO | NO | NO |
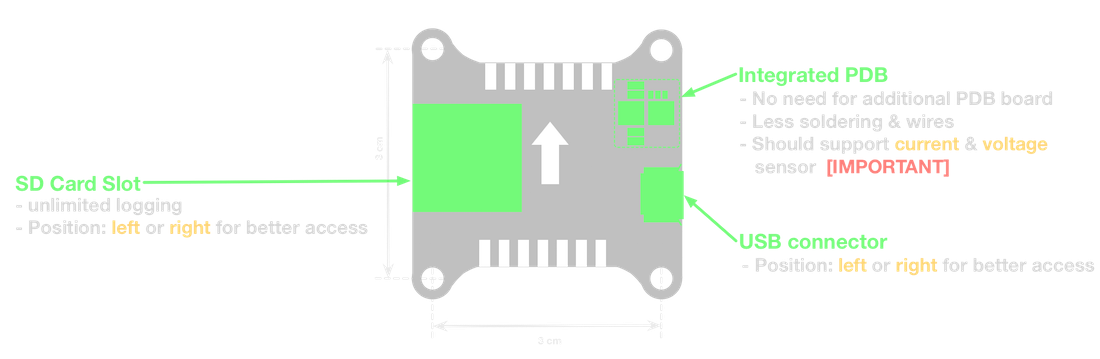
| SD Card | NO | YES | NO | NO |
| WS2812B | YES | YES | YES | YES |
| Buzzer | YES | YES | YES | YES |
| Volt/Ampere | YES | YES | YES | YES |
| Gyro/ACC | MPU6050 | MPU6000 | MPU6000 | Invensense 20602 |
| Manual | Web, PDF | Web, PDF | Web, PDF, PDF | Web, PDF |
| |
||||
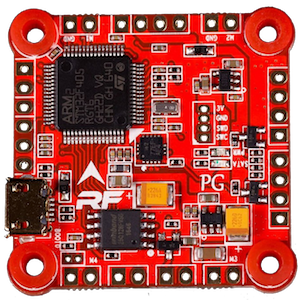
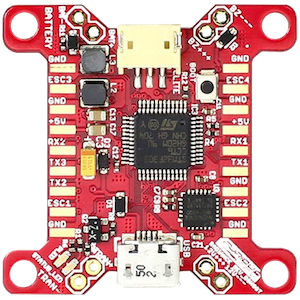
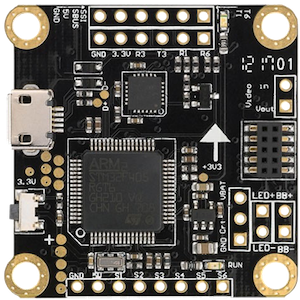
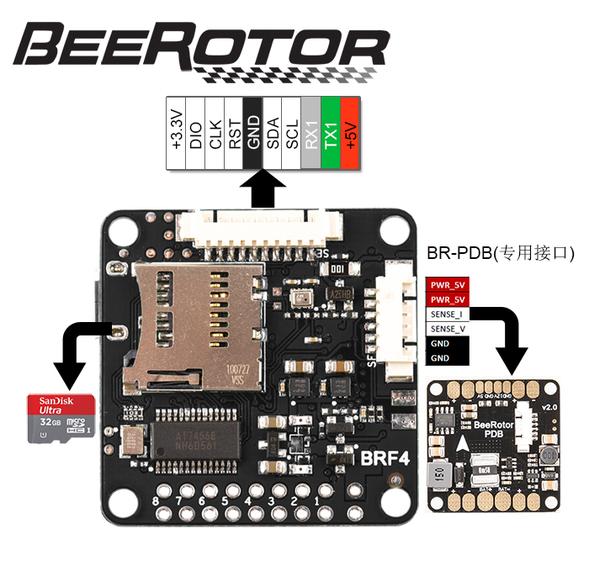
| Name | BeeRotorF4 with BFOSD | Furious Radiance F3 | HobbyWing XRotor F4 | |
| Controller | 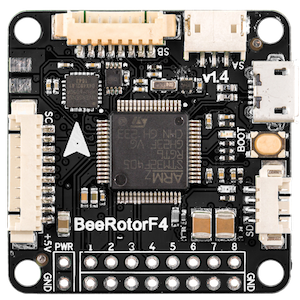 |
 |
 |
|
| SBUS | YES | YES | YES | |
| SmartPort | YES | YES | YES | |
| PDB | NO | YES (5V 2A) |
NO | |
| OSD | YES | NO | YES | |
| SD Card | YES | NO | YES | |
| WS2812B | YES | YES | YES | |
| Buzzer | YES | YES | YES | |
| Volt/Ampere | YES | YES (V) | YES (V) | |
| Gyro/ACC | MPU6050 | MPU6000 | MPU6000 | |
| Manual | WEB, IMG, IMG | WEB, PDF | WEB, PDF | |
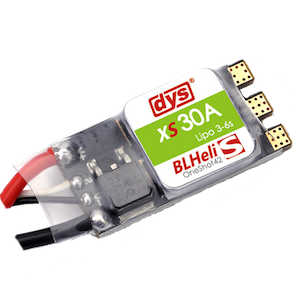
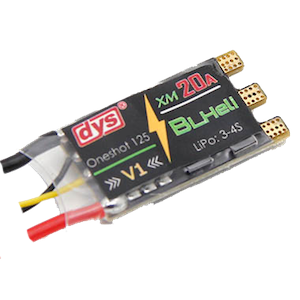
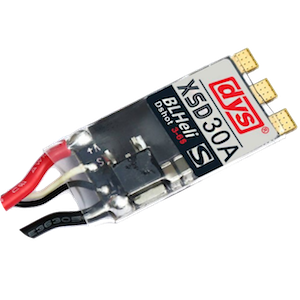
| Name | XSD20A | XSD30A | XM20A V1 | XS30A |
|---|---|---|---|---|
|
 |
|
|
|
| Voltage | 3S - 4S | 3S - 4S | 3S - 4S | 3S - 6S |
| Ampere | 20A | 30A | 20A | 30A |
| Size [mm] | 24x14x4.5 | 45x16.5x5.8 | 24x14x4.5 | 45x16.5x5.8 |
| Weight | 4.32g | 7.5g | 5.8g | 8.65g |
| Oneshot | 42, 125 | 42, 125 | 125 | 42, 125 |
| Dshot | 300, 600 | 300, 600 | - | - |
| |
||||
| Name | Little Bee 20A | Lightning 20A | Lightning_S 35A | Lumenier 35A |
|
 |
|
|
|
| Voltage | 2S - 4S | 3S - 6S | 3S - 4S | 3S - 6S |
| Ampere | 20A | 20A | 35A | 35A |
| Size [mm] | 23x12.5x3 | 24.5x12.5x5< | 23x12.5x3 | 30x16x6 |
| Weight | 4g | 5.5g | 5.6g | 4.8g |
| Oneshot | 125 | 42, 125 | 125 | 42, 125 |
| Dshot | - | - | - | 1200 |
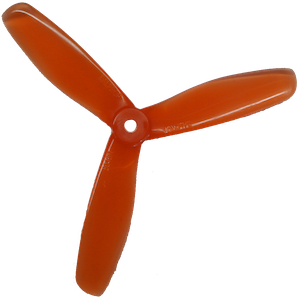
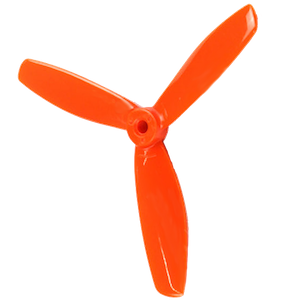
| Name | RaceKraft 5051 TCS | DAL CYCLONE | Kingkong 5051 | Kingkong 5040 |
|---|---|---|---|---|
|
|
 |
 |
|
| Mounting Hole | 5mm | 5mm | 5mm | 5mm |
| Blades | 3 | 3 | 3 | 3 |
| Pitch | 5.0 | 4.6 | 5.1 | 4.0 |
| Weight | 5.8g | 6.82g |
|
 |
|
 |
|
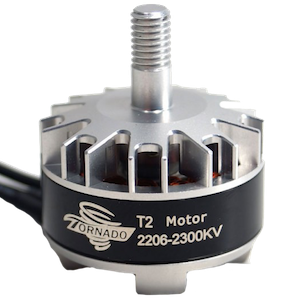
| Name | EMAX RS2205 S | 3B-R 2206 | DYS SE2205 | Tornado T2 |
| KV | 2300 | 2500 | 2300 | 2300 |
| Strator | 22x05 | 22x06 | 22x05 | 22x06 |
| Volt | 3S - 4S | 2S - 4S | 3S - 5S | 3S - 5S |
| Ampere | 37A | 48A | 27A | 33A |
| Propellor | 5" | 5" | 5" | 5" |
| Shaft | M5 | M5 | M5 | M5 |
| Weigth | 28g | 33g | 30g | 30g |
| |
||||
|
|
|||
| Name | KDE1806XF | DYS BE1806 | ||
| KV | 2350 | 2300 | ||
| Strator | 18x06 | 18x06 | ||
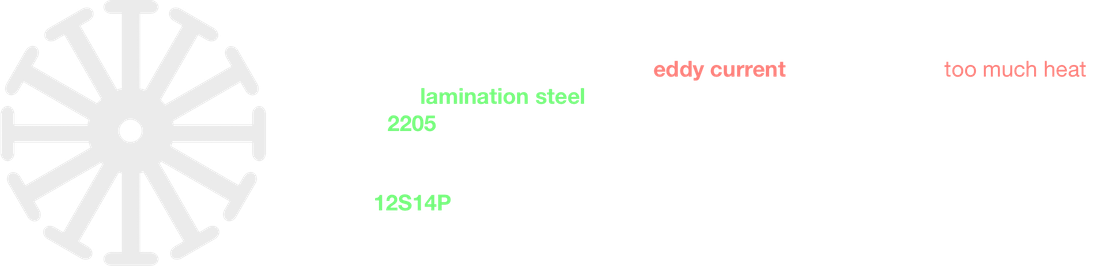
| Type | 12S14P | |||
| Volt | 2S - 4S | 3S - 4S | ||
| Ampere | 18A | 13.6A< | ||
| Propellor | 5" | 5" | ||
| Shaft | M4 | M5 | ||
| Weigth | 18g | 18g | ||
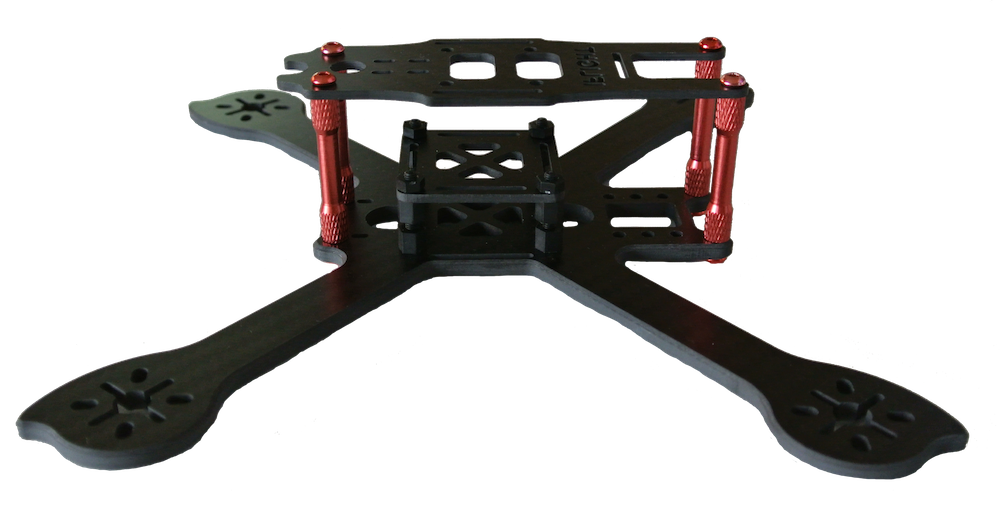
 Website: 3B-R 214
Website: 3B-R 214
| Name | Propellers | Motor to motor | Airframe | Camera mount | Weight |
|---|---|---|---|---|---|
| 3B-R 214 | 5" | 214mm | 3.5mm unibody plate | 26mm | 83g |
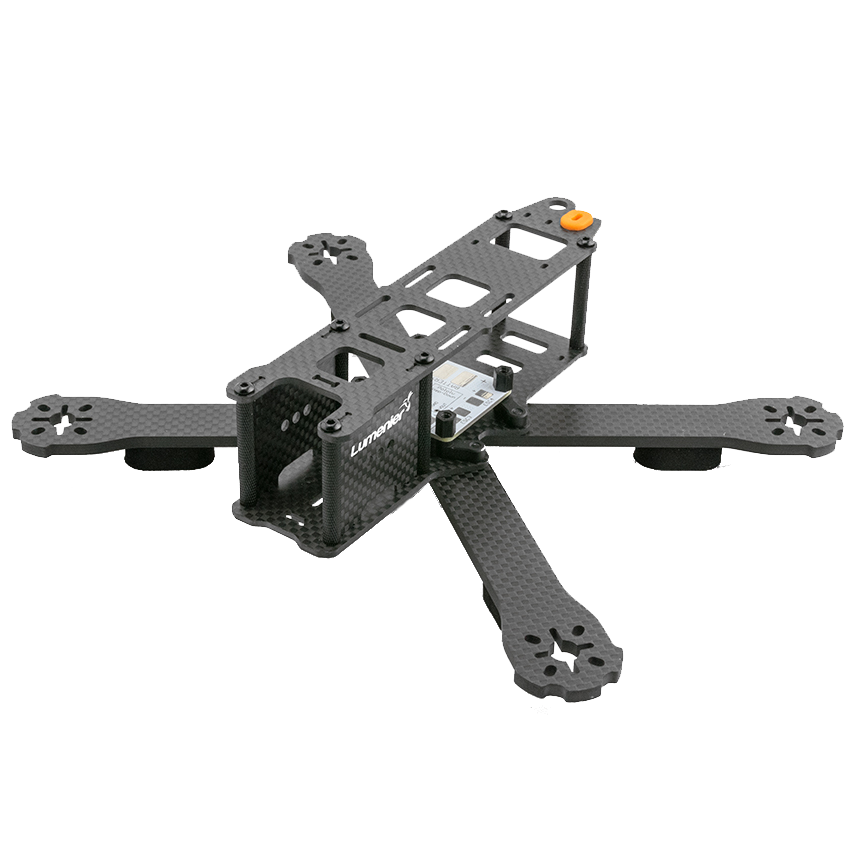
 Website: Lumenier QAV-X
Website: Lumenier QAV-X
| Name | Propellers | Motor to motor | Airframe | Camera mount | Weight |
|---|---|---|---|---|---|
| QAV-X 210 | 5" | 214mm | 4mm unibody plate | 26mm | 93g |
 Website: Lumenier QAV-R
Website: Lumenier QAV-R
| Name | Propellers | Motor to motor | Airframe | Camera mount | Weight |
|---|---|---|---|---|---|
| QAV-R 220 | 5" | 222mm | 4mm arms | 26mm | 99g |
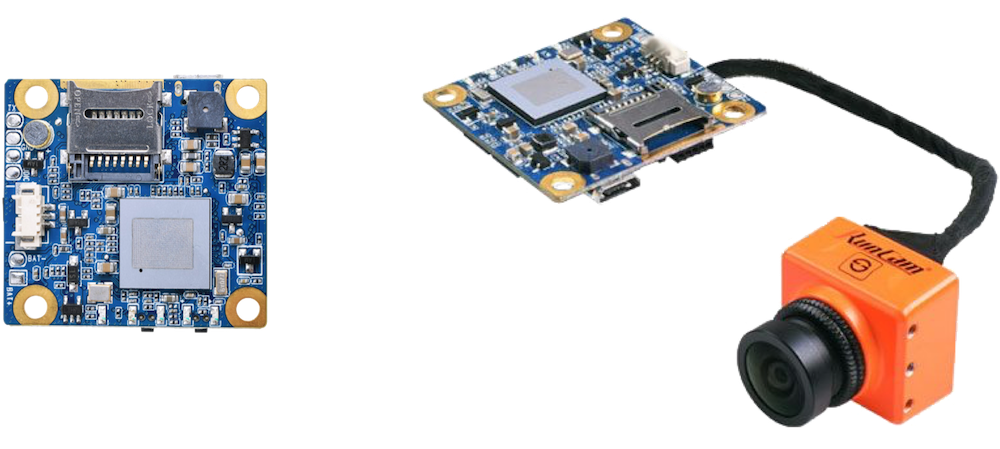
| Name | RunCam Owl Plus | RunCam Eagle | RunCam Swift | Foxeer XAT600M HS1177 |
|---|---|---|---|---|
| Camera |  |
 |
 |
|
| Voltage | 5-22V | 5-17V | 5-36V | 5-35V |
| Sensor | 1/2" MCCD | 1/1.8" CMOS | 1/3" CCD | 1/3" CCD |
| Horiz. Resol. | 700TVL | 800TVL | 600TVL | 600TVL |
| Weight | 15g | 16g | 14g | 15g |
| WDR | D-WDR | Global WDR | D-WDR | D-WDR |
| DNR | 2DNR | 2DNR | 2DNR | 2DNR |
| Manual | WEB, RCG, PDF | WEB, RCG, PDF | WEB, RCG, PDF | WEB, PDF |
| |
||||
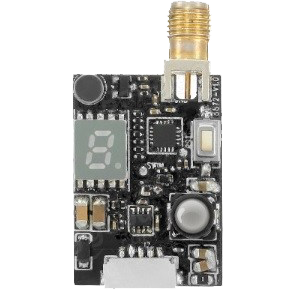
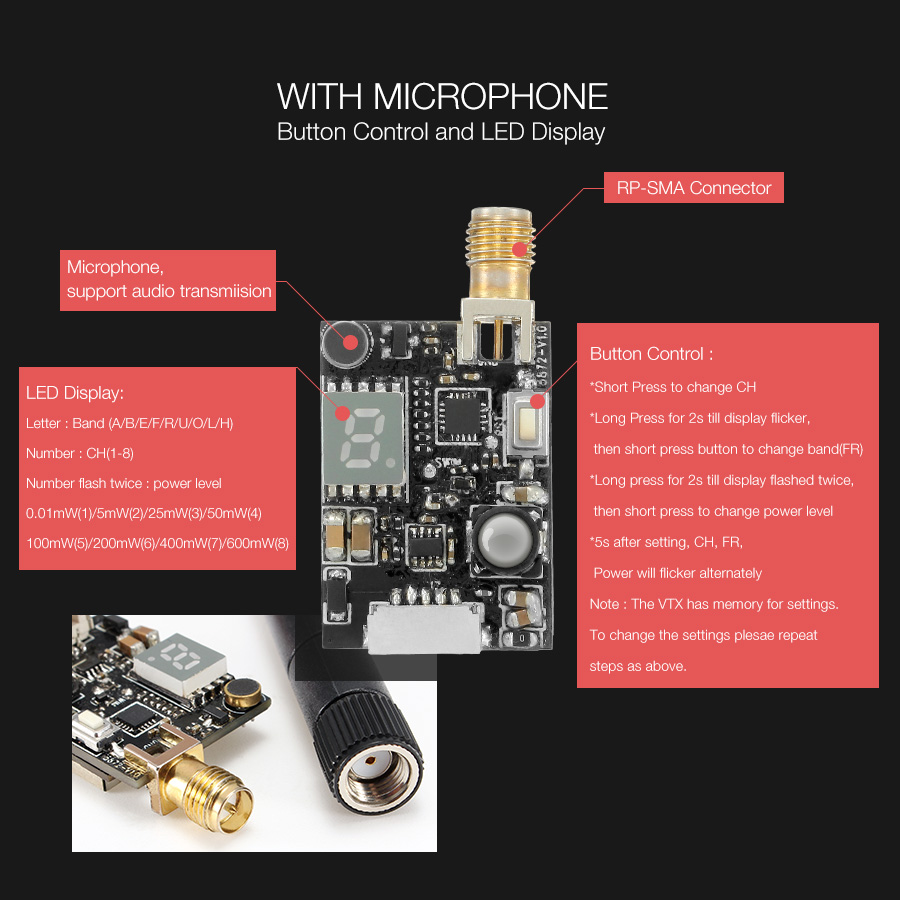
| Name | FT48X 5.8G | Eachine TX801 | TBS UNIFY PRO 5G8 HV | - |
| Radio | |
 |
 |
|
| Voltage | 2S - 6S | 2S - 6S | 2S - 6S | - |
| TX Power [mW] | 0.25/25/200/600 | 0.01/5/25/50/100/ 200/400/600 | 25/200/500/800 | - |
| 5V support | YES 300mA |
YES 550mA |
YES 600mA |
- |
| Weight | 9g | 7.3g | 5g | - |
| Size [mm] | 31x22x8 | 28x20x8 | 31x22x6 | - |
| Connector | SMA | RP-SMA | SMA or RP-SMA | - |
| Manual | WEB, IMG, IMG | WEB, PDF | - | |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}